OpenGL ES 的很多教程里都会有这样一个例子来讲解纹理:将一张图片作为纹理显示在屏幕上。
因为纹理坐标和实际屏幕显示的坐标不一样,把图片渲染在屏幕上后,图片是上下颠倒的。
一个解决方法是对当前的顶点坐标,乘以绕 z 轴旋转180度的矩阵,这样图片就能正确显示了。
$$
\begin{bmatrix}
cos\theta & -sin\theta & 0 & 0 \\ sin\theta & cos\theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \
\end{bmatrix}
$$
那么如何理解这个旋转矩阵呢?
影响我们理解这个矩阵的第一个问题是:
为什么这个矩阵是 4x4 的? 而且我们发现旋转,缩放、平移等变换矩阵都是 4x4 的。
在直观上的认知里,表达一个三维空间的坐标用 x,y,z 就足够了,那在三维空间里进行矩阵变换,用 3x3 的矩阵就够了,为什么需要 4x4 呢?
为了回答这个问题,下面我们先在几何意义上理解向量和矩阵之间的关系,然后通过推导旋转矩阵和平移矩阵,一步步来解开这个疑惑。
向量和矩阵
在几何平面上,我们可以把平面上任意一点,当作与原点组成的一个 向量 来理解。
如图 ,A 点可以表示成向量 $\vec{OA}$ ;在 x 轴和 y 轴上各有 i 点(1, 0)和 j 点(0,1),同样的,让它们与原点组成向量,为了简化,我们用 $\vec{i}$ 和 $\vec{j}$ 表示这两个向量。
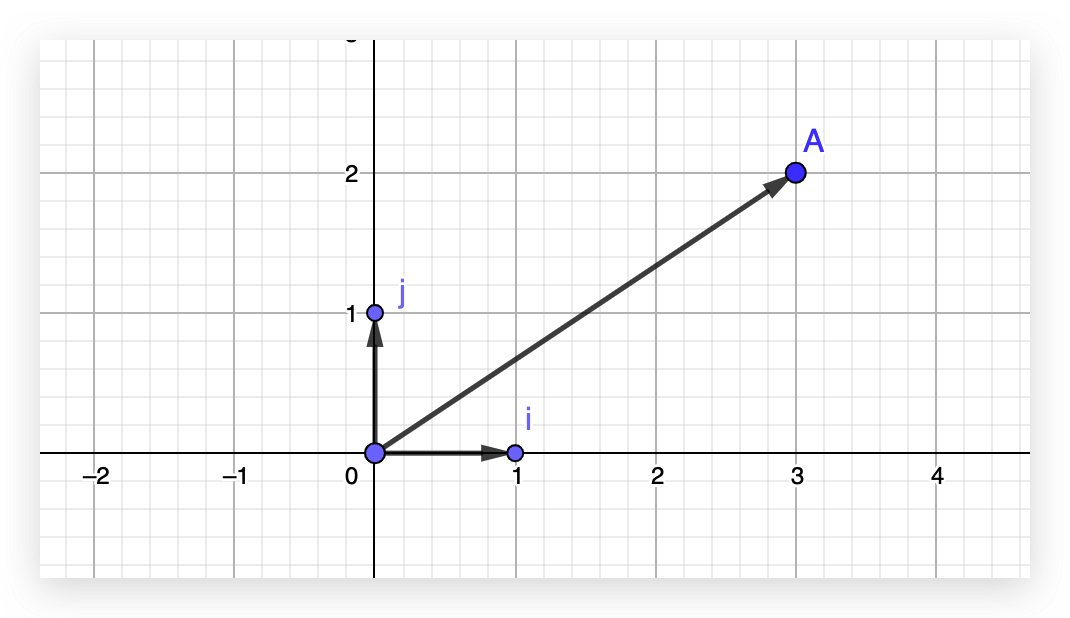
因为 A 点的坐标为 (3, 2),如果我们要用 $\vec{i}$ 和 $\vec{j}$ 表示 $\vec{OA}$ ,那是这样的:
$$
3\vec{i} + 2\vec{j} = \vec{OA}
$$
这里的几何意义是 $\vec{i}$ 延展到 $3\vec{i}$ ,$\vec{j}$ 延展到 $2\vec{j}$ ,然后把这两个向量相加即可得到 $\vec{OA}$
i 坐标是 (1, 0),j 坐标是 (0,1),我们把上面这个等式转换成竖列的形式:
$$
3
\begin{bmatrix}1\\0\end{bmatrix}
+
2
\begin{bmatrix}
0\\1
\end{bmatrix}
=
\begin{bmatrix}
3 \\ 2
\end{bmatrix}
$$
这里其实是向量的简单运算,运算过程如下:
$$
\begin{bmatrix}
3 \times 1 \\ 3 \times 0
\end{bmatrix}
+
\begin{bmatrix}
2 \times 0\\2 \times 1
\end{bmatrix}
=
\begin{bmatrix}
3 \times 1 + 2 \times 0\\3 \times 0 + 2 \times 1
\end{bmatrix}
=
\begin{bmatrix}
3\\2
\end{bmatrix}
$$
看到运算过程是否有种似曾相识的感觉?这不就是矩阵与向量的乘法计算吗?这个运算其实就是将向量左乘一个矩阵 的计算:
$$
\begin{bmatrix}
1 & 0\\0 & 1
\end{bmatrix}
\begin{bmatrix}
3\\2
\end{bmatrix}
=
\begin{bmatrix}
3 \times 1 + 2 \times 0 \\3 \times 0 + 2 \times 1
\end{bmatrix}
=
\begin{bmatrix}
3 \\ 2
\end{bmatrix}
$$
这里 $\begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}$ 其实就是单元矩阵,左乘一个单元矩阵并不会改变原来的值。而这个单元矩阵以两个竖列来看,正是 i 和 j 点的坐标,也是向量 $\vec{i}$ 和 $\vec{j}$ ,在数学上将 $\vec{i}$ 和 $\vec{j}$ 称为此坐标系的 基向量。
推导旋转矩阵
我们现在把整个坐标轴绕原点逆时针旋转 $45^o$ :
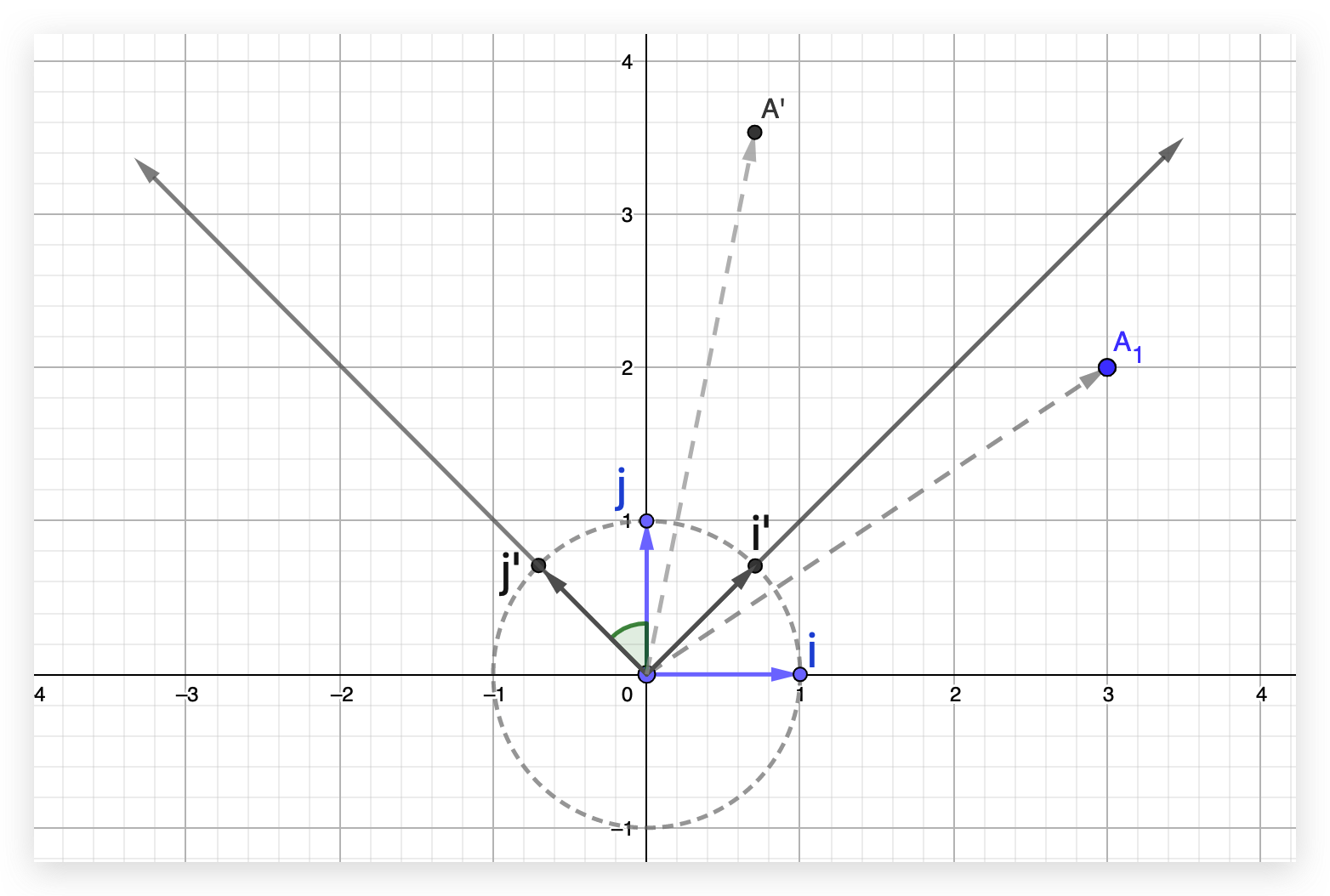
旋转后 i 点和 j 点对应 $i^\prime$ 和 $j^\prime$ 位置。
通过简单的三角函数计算得到: $i^\prime$ 坐标为 $\begin{bmatrix}cos45^o \\ sin45^o\end{bmatrix}$ ,$j^\prime$ 坐标为 $\begin{bmatrix} -sin45^o \\ cons45^o \end{bmatrix}$
旋转后,A 点的坐标是多少呢?回顾上面的做法, $\vec{i^\prime}$ 延展到 $3\vec{i^\prime}$ ,$\vec{j^\prime}$ 延展到 $2\vec{j^\prime}$ ,然后把这两个向量相加即可得到 $\vec{OA^\prime}$ 。结合上面一节矩阵和向量的推演,可以变成下面的形式:
$$
\begin{bmatrix}
cos45^o & -sin45^o \\sin45^o & cos45^o
\end{bmatrix}
\begin{bmatrix}
3 \\ 2
\end{bmatrix}
$$
我们发现,左边的矩阵不正是开头所看到的 旋转矩阵 吗?只不过这是二维平面上的旋转矩阵:
$$
\begin{bmatrix}
cos\theta & -sin\theta \\sin\theta & cos\theta
\end{bmatrix}
$$
结合图形和计算,我们可以这样理解这个二维矩阵:二维矩阵代表一个坐标系里的两个基向量,而在这个坐标系里的点与原点组成的向量,都可以用这两个基向量的变换来表示。那么旋转一个点,可以转换成旋转这个点所在的坐标系,从而通过变化的基向量求出旋转后的点的位置。
其实这种变换在数学上称作 线性变换 ,线性变换是通过 矩阵乘法 来实现
线性变换:是在两个向量空间(包括由函数构成的抽象的向量空间)之间的一种保持向量加法和标量乘法的特殊映射
线性变换在几何直观上有如下特点:
变换前后,直线仍然保持是直线的状态
变换前后,原点保持固定,不会变化
我们从二维平面,推导到三维坐标也是同理,只不过是多了个 z 轴
$$
\begin{bmatrix}
1 & 0 & 0 \\0 & 1 & 0 \\0 & 0 & 1
\end{bmatrix}
$$
竖着来看这个矩阵,是 x,y,z轴上的三个基向量,同时它又是一个单元矩阵。
同理上面二维平面的推导,三维坐标绕 z 轴的旋转矩阵为:
$$
\begin{bmatrix}
cos\theta&-sin\theta&0\\sin\theta&cos\theta&0\\0&0&1
\end{bmatrix}
$$
推导平移矩阵
那么平移操作,能不能也用这种矩阵与向量相乘的形式呢?我们再次回到二维平面,看看将 A 点平移到 B 点的情况是怎样的。
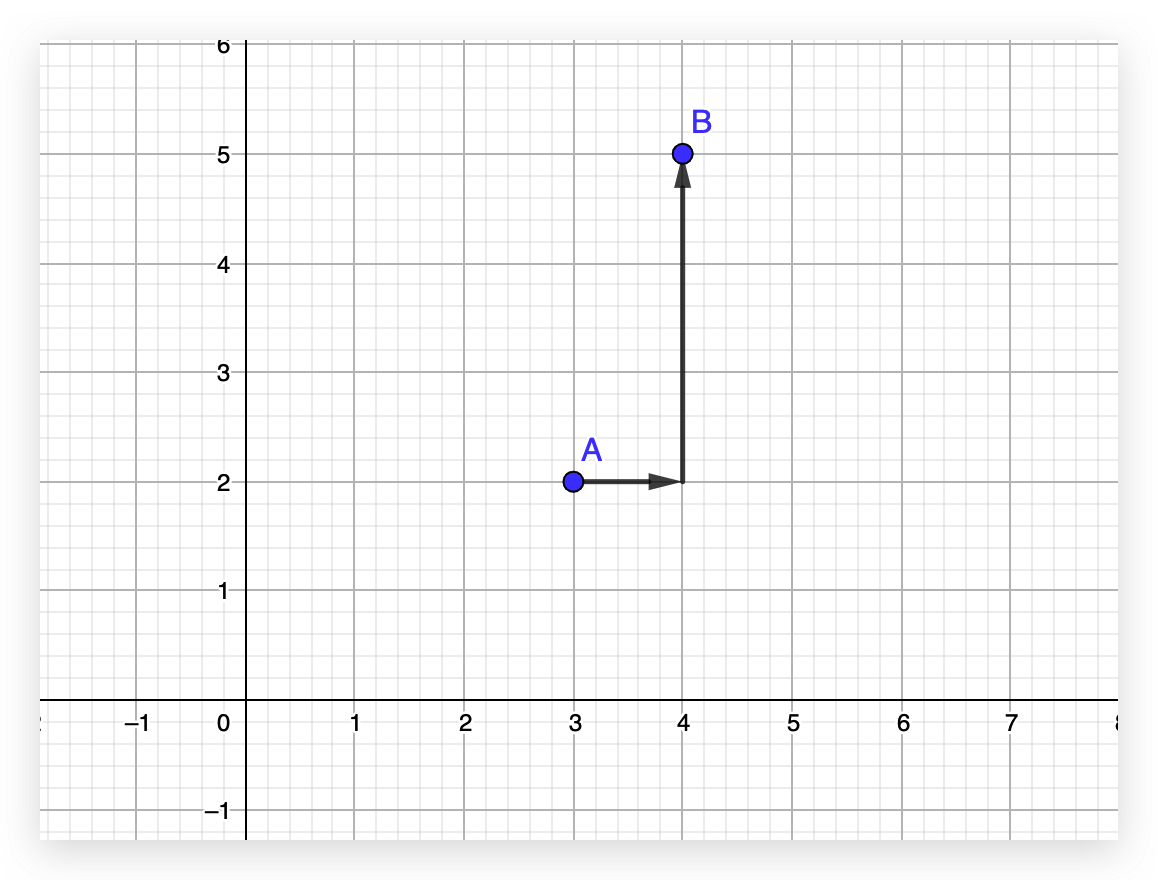
要将 A 点(3,2)平移到 B 点(4,5),实际上就是先将 A 点往右移动 1 ,再往上移动 3,即 x 坐标值增加 1,y坐标值增加 3
$$
\begin{bmatrix}
x + 1 \\ y + 3
\end{bmatrix}
=
\begin{bmatrix}
x \\ y
\end{bmatrix}
+
\begin{bmatrix}
1 \\ 3
\end{bmatrix}
=
\begin{bmatrix}
3 + 1 \\ 2 + 3
\end{bmatrix}
=
\begin{bmatrix}
4 \\ 5
\end{bmatrix}
$$
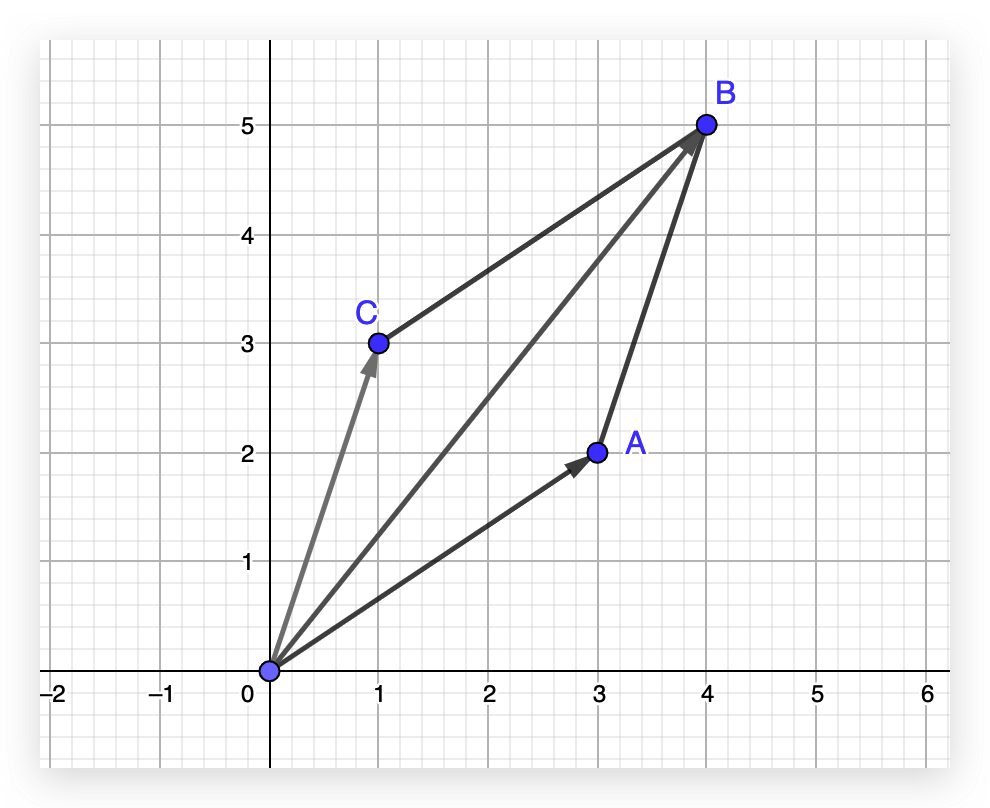
从上面的运算来看,平移这种操作实际上是 向量的加法,即:
$$
\vec{OA} + \vec{OC} = \vec{OB}
$$
$$
\begin{bmatrix} 3 \\ 2 \end{bmatrix} + \begin{bmatrix} 1 \\ 3 \end{bmatrix}=\begin{bmatrix} 4 \\ 5 \end{bmatrix}
$$
我们可以通过向量加法的 平行四边形法则 加深理解,如下图:
对于平移这种操作,我们无法仅仅通过矩阵乘法来实现。
而实际上,平移这种操作属于 仿射变换 。
仿射变换,又称仿射映射,是指在几何中,对一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。
仿射变换在几何直观上,相比线性变换,它不需要保证变换前后坐标原点不变。
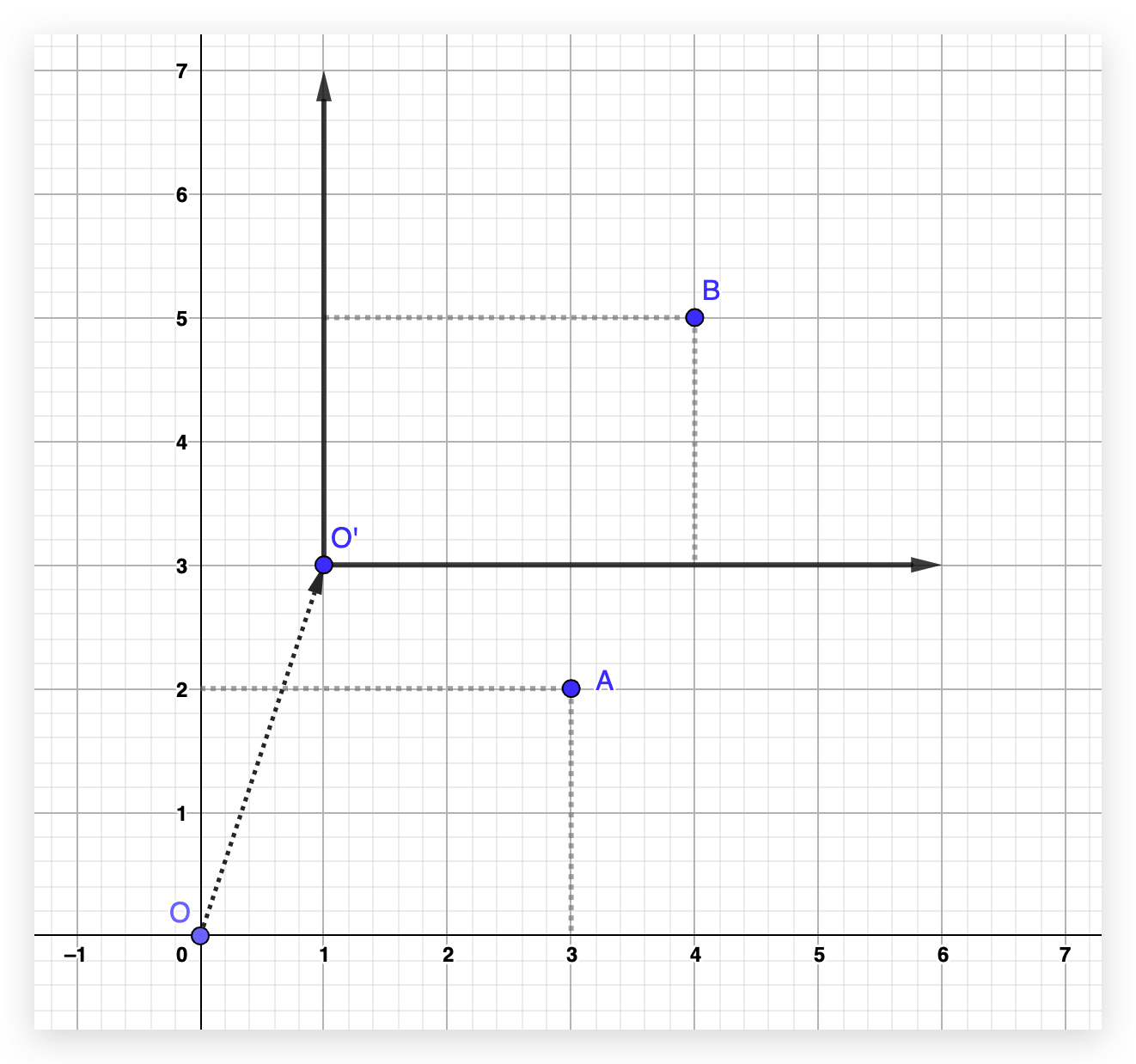
如下图,从 A 点平移到 B 点,我们换一个角度思考,这次不移动点,而是移动整个坐标轴,同样可以达到平移 A 点到 B 点的需求,但是坐标原点移动到了 O’ 点(1,3)。
我们希望构造的是像下面这种矩阵乘法的等式,这样才能用一个通用的计算模式来处理坐标点的变换。
$$
\begin{bmatrix}
矩阵
\end{bmatrix}
\begin{bmatrix}
3\\2
\end{bmatrix}
=
\begin{bmatrix}
4\\5
\end{bmatrix}
$$
到这里,我们终于要请出 齐次坐标 了。
齐次坐标就是将一个原本是 n 维的向量用一个 n+1 维向量来表示,是指一个用于投影几何里的坐标系统,如同用于欧氏几何里的笛卡儿坐标一般。
用一个通俗的讲法是,我们需要 升维 来处理这个问题。
通过增加一个维度,我们可以在
高维度上,通过线性变换来处理低维度的仿射变换。
这句话咋一听感觉很有哲理,但是通过下面的数学等式就能知道其中的奥妙:
$$
\begin{bmatrix}
1 & 0 & 1 \\0 & 1 & 3 \\0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
3 \\ 2 \\ 1
\end{bmatrix}
=
\begin{bmatrix}
1 \times 3 + 0 \times 2 + 1 \times 1 \\0 \times 3 + 1 \times 2 + 3 \times 1 \\0 \times 3 + 0 \times 2 + 1 \times 1
\end{bmatrix}
=
\begin{bmatrix}
4 \\ 5 \\ 1
\end{bmatrix}
$$
观察上面的运算过程,结果 $\begin{bmatrix}4\\5\\1 \end{bmatrix}$ 不正是我们上面所得的 $\begin{bmatrix} 4\\5 \end{bmatrix}$ 吗?只不过多了一个 z 轴的坐标值。
我们通过升级一个维度,将在二维平面上的平移问题转换成了在三维坐标的矩阵和向量乘法。那么在二维平面上,这个平移矩阵就为:
$$
\begin{bmatrix}
1 & 0 & tx \\0 & 1 & ty \\0 & 0 & 1
\end{bmatrix}
$$
tx 和 ty 就对应在 x 轴 和 y 轴上的移动距离。
同理推广到三维坐标系,要实现三维坐标的平移操作,同样需要通过升维,引入齐次坐标来计算。那么三维坐标下的平移矩阵就为:
$$
\begin{bmatrix}
1 & 0 & 0 & tx \\0 & 1 & 0 & ty \\0 & 0 & 1 & tz \\0 & 0 & 0 & 1 \
\end{bmatrix}
$$
总结
至此,我们可以回答最开始的问题了,为什么 OpenGL 里的矩阵变换是 4x4 的矩阵呢?
我们来想象这样一个场景:如果我要让顶点坐标旋转一定角度后,再平移一段距离,那么这里面的操作就涉及 3x3 矩阵的计算和 4x4 矩阵的计算,如果不统一起来,这种连续变换的计算操作将很复杂。
所以如果要用矩阵乘法来统一所有的平移、旋转等等变换计算,为了照顾到平移这类仿射变换,统一用 4x4 矩阵来计算既能满足场景又方便计算。

